- Catalogs
- Inertial Labs, Inc.
- Products Catalog 2025
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
Products Catalog 2025

Products Catalog 2025
VIAVI Solutions is a global leader in network test, monitoring, and assurance solutions, serving sectors such as telecommunications, cloud, enterprises, military, aerospace, and more. They also specialize in light management technologies for various applications including 3D sensing and anti-counterfeiting.
Inertial Labs, a VIAVI Solutions company, has over 20 years of experience in designing and manufacturing Inertial Measurement Units (IMUs), GPS-Aided Inertial Navigation Systems (INSs), and other sensor fusion products. Their solutions integrate data from multiple sources for applications in navigation, stabilization, and more.
The products are used in various sectors including aerospace, industrial, land, and maritime for navigation, stabilization, and dynamic positioning.
Products like TAA-308, TAA-315, and TAA-340 offer different measurement ranges and specifications. They are designed for applications such as UAV and AUV/ROV navigation and control, platform orientation, and stabilization.
Products such as TAG-304, TAG-207, and TAG-307 provide high precision with different axis configurations and measurement ranges. They are suitable for guidance, navigation, and stabilization applications.
The KERNEL-100 unit offers high accuracy in gyro and accelerometer measurements, suitable for precise navigation and control applications.
- Gyro Bias in-run Stability (RMS): Ranges from 0.5º/h to 3º/h depending on the model.
- Gyro Noise (ARW): Varies from 0.025º/√h to 0.3º/√h.
- Accel Bias in-run Stability: Typically around 0.005 mg (RMS, 8g).
- Pitch & Roll Accuracy: Generally 0.05º (Static, RMS).
- Accel SF Accuracy (over temp. range): Ranges from 150 ppm to 500 ppm.
- Size and Weight: Sizes vary from 28.38 x 19.5 x 10.5 mm to 88.90 x 84.50 mm, with weights ranging from 10 g to 790 g.
- Autonomous Vehicles
- Line of Sight (LoS) Stabilization
- Micro-UAV Systems
- Anti-Roll Systems
- Gimbals and Motion Control Sensors
- KERNEL-110/120: Suitable for autonomous vehicles and stabilization systems.
- KERNEL-201: Offers improved gyro bias stability and is used in guidance and navigation.
- IMU-P Tactical/Industrial: Designed for anti-roll systems and motion control.
- IMU-NAV-100/200: Used in navigation and motion analysis, especially in GPS-denied environments.
- Heading Accuracy: 0.3° static / 0.6º dynamic.
- Pitch & Roll Accuracy: 0.05° static / 0.08º dynamic.
- AHRS-10B and AHRS-10P: Both systems offer a heading accuracy of 0.3° static and 0.6° dynamic, with pitch and roll accuracy of 0.05° static and 0.08° dynamic for AHRS-10B, and 0.03° static and 0.05° dynamic for AHRS-10P. They feature gyroscopes with 2º/h and 1º/h bias in-run stability respectively, and accelerometers with 0.01mg and 0.005mg bias in-run stability. Both have an embedded fluxgate magnetic compass, size of 90 × 27 × 26 mm, and weights of 77 g and 84 g respectively.
- AHRS-II-P: Offers similar heading accuracy to the AHRS-10 series but with improved pitch and roll accuracy of 0.03° static and 0.05° dynamic. It shares the same gyroscope and accelerometer specifications as AHRS-10P, with a larger size of 120 x 50 x 53 mm and a weight of 280 g.
- miniAHRS: Provides the same heading and pitch & roll accuracy as AHRS-10B, with a smaller size of 53 × 19 × 13 mm and a weight of 20 g.
- OptoAHRS-II: Features superior heading accuracy of <0.2° static and pitch & roll accuracy of 0.05° static. It includes a MEMS tactical-grade IMU and a single or dual day/night infrared camera option. The system is larger and heavier, measuring 172.2 × 80.5 × 55 mm and weighing 784 g.
- Cheetah Nav: Offers heading accuracy of 3 MIL (INS-B) and 1 MIL (INS-D), with position accuracy of 1 cm (RTK), 2.5 cm (PPP), and 60 cm (SBAS). It supports multiple GNSS constellations and correction methods, with an optional external magnetic compass.
- INS-U: Provides heading accuracy of 0.6° static and 0.3° dynamic, with position accuracy of 1 cm (RTK). It includes a MEMS IMU and an embedded mini-fluxgate magnetometer, with a compact size of 82 x 40 x 26 mm and a weight of 200 g.
- INS-D, INS-DU, INS-DL: These systems offer varying heading accuracies based on baseline distances, with position accuracy of 1 cm (RTK) and 60 cm (SBAS). They support multiple GNSS constellations and correction methods, with optional external magnetic compasses.
- INS-P, INS-B, INS-BU: These systems provide different static and dynamic heading accuracies, with position accuracy of 1 cm (RTK) and 2.5 cm (PPP). They include MEMS tactical-grade IMUs and optional external magnetic compasses.
- Heading Accuracy: Generally 0.08° for most systems, with variations depending on the baseline and system type.
- Position Accuracy: Typically 1 cm with RTK, and up to 40 cm with DGPS.
- Pitch & Roll Accuracy: Dynamic accuracy is around 0.01°.
- GNSS Constellations: Supported constellations include BDS, GAL, GLO, GPS, QZSS, and NavIC (IRNSS) for some systems.
- Corrections: Systems support DGPS, PPK, RTK, SBAS, and PPP corrections.
- IMU Types: Include MEMS, Tactical-grade, and FOG, with some systems offering optional configurations.
- Magnetometers: Options include embedded mini-fluxgate and external magnetic compasses.
- Size and Weight: Varies across systems, with sizes ranging from 82 x 40 x 26 mm to 322 x 233 x 50 mm and weights from 200 g to 4050 g.
- Systems are used in UAV flight control, land vehicle navigation, precision agriculture, heavy vehicle guidance, and GNSS-denied environments.
- Air Data Computer: Provides pressure sensor measurements with high accuracy and supports airspeed calculations.
- Antenna Systems: Include controlled reception pattern antennas with GNSS L1, L2, L5 bands and interference suppression capabilities.
- Applications: These units are used in UGVs, land vehicles, UAVs, helicopters, and for navigation in GNSS-enabled and GNSS-denied environments. They are crucial for tactical navigation and medium accuracy gyrocompassing.
- Specifications: The MRUs are categorized into different models such as MRU-B1, MRU-B1.1, MRU-B2, MRU-E, MRU-P, MRU-PD, WS-E, and WS-PD. Each model has specific output signals, heave accuracy, pitch & roll accuracy, size, and weight.
- Key Features: The MRUs provide heave, surge, sway, pitch, roll, and heading data with varying degrees of accuracy. They are equipped with embedded fluxgate magnetometers or dual antenna GNSS systems for enhanced heading accuracy.
- Specifications: The RMCU offers heading accuracy of 0.3º static and 0.6º dynamic, with pitch & roll accuracy of 0.05º static and 0.08º dynamic. It includes gyroscopes and accelerometers with high bias in-run stability.
- Applications: It is used for railway monitoring and navigation safety, complying with certifications like EN 45545, EN 50155, and EN 50011.
- System Accuracy: These instruments achieve a maximum system accuracy of 1.5 cm to 2 cm, with data internal precision matching the system accuracy.
- Features: They include flex configuration, sensor expansion, real-time protocol, dual-antenna, MMS, SLAM, and onboard storage options. They are compatible with various laser scanners and RGB cameras.
- Applications: These instruments are used for remote sensing tasks such as wave energy analysis, ocean surge tracking, and dynamic positioning systems.
- Camera Models: The document lists several camera models including R1 61MP, Sony A5100 OEM 24MP, OEM 5MP, and a 5MP Global Shutter. An optional model, Sony ILX-LR1, is also mentioned.
- System Accuracy: The system accuracy varies across models, with values of 2 cm for most models and 1.5 cm for the 5MP Global Shutter.
- Data Internal Precision: Similar to system accuracy, the internal precision is 2 cm for most models, with the 5MP Global Shutter offering a precision of 0.5 cm.
- Flex Configuration: Available for certain models.
- Sensor Expansion: Supported.
- Real-time Protocol: Supported for specific models.
- Dual-Antenna: Available for certain models.
- MMS, SLAM, Backpack/Handheld Kit: These features are supported across various models.
- Onboard Storage (SSD): Available for select models.
- RESEPI SnapFit Interface: Supported for specific models.
- Weight: The weight of the devices ranges from 0.9 kg to 1.3 kg depending on the model.
- Address: 20098 Ashbrook Place, Ashburn, VA 20147, USA
- Website: www.inertiallabs.com
- Phone: +1 (703) 880-4222
Catalog excerpts

^Inertial Labs VIAVI Solutions company
Open the catalog to page 1
PIONEERING PRECISION IN INERTIAL NAVIGATION AND SENSOR FUSION FOR OVER 20 YEARS About VIAVI Solutions VIAVI (NASDAQ: VIAV) is a global provider of network test, monitoring and assurance solutions for telecommunications, cloud, enterprises, first responders, military, aerospace and railway. VIAVI is also a leader in light management technologies for 3D sensing, anti-counterfeiting, consumer electronics, industrial, automotive, government and aerospace applications. Learn more about VIAVI at www.viavisolutions.com. Follow us on VIAVI Perspectives, LinkedIn and YouTube. About Inertial Labs, a VIAVI...
Open the catalog to page 2
APPLICATIONS AEROSPACE Navigation, Stabilization and Pointing Small to Large Scale Operations Dynamic Position, Heave, Surge and Sway About Inertial Labs, a VIAVI Solutions Company Highly Technical Staff
Open the catalog to page 3
a VIAVI Solutions company
Open the catalog to page 4
INERTIAL MEASUREMENT UNITS 12
Open the catalog to page 12
Inertial Measurement Units
Open the catalog to page 13
Inertial Measurement Units
Open the catalog to page 16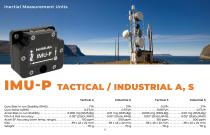
Inertial Measurement Units Tactical A Industrial A Tactical S Industrial S
Open the catalog to page 17
Inertial Measurement Units 500 ppm (over temp. range)
Open the catalog to page 20
ATTITUDE AND HEADING REFERENCE SYSTEMS 24
Open the catalog to page 24
Heading Accuracy . . . Pitch & Roll Accuracy Embedded Fluxgate Magnetic Compass Embedded Fluxgate Magnetic Compass
Open the catalog to page 26
ATTITUDE AND HEADING REFERENCE SYSTEMS Heading Accuracy Pitch & Roll Accuracy Gyroscopes (bias inrun stability) (º/h) 0.01mg Bias in-run stability 0.005mg Bias in-run stability 0.005mg Bias in-run stability 0.01mg Bias in-run stability Embedded Fluxgate Magnetic Compass Embedded Fluxgate Magnetic Compass Embedded Fluxgate Magnetic Compass Embedded Fluxgate Magnetic Compass Embedded Fluxgate Magnetic Compass Industrial Platform Stabilization, Industrial Pointing, Rapidly Rotating Platform Tactical Pointing & Stabilization, TacticalGrade Magnetic and True North Finding Dynamic Motion Control, Navigation...
Open the catalog to page 29
INERTIAL NAVIGATION SYSTEMS 30
Open the catalog to page 30
INS-DU INS-DL
Open the catalog to page 33
INS-P INS-B INS-BU
Open the catalog to page 34
Inertial Navigation Systems
Open the catalog to page 35
VISION-AIDED INERTIAL NAVIGATION SYSTEM GNSS-Denied Horizontal Position Visual Odometry Vertical Position Pitch & Roll
Open the catalog to page 38
MOTION REFERENCE UNITS 43
Open the catalog to page 43
MRU-E | MRU-P | MRU MRU-E MRU-P
Open the catalog to page 45
Output Signals Pitch & Roll Accuracy Heading Accuracy . . . Position Accuracy . . .
Open the catalog to page 46
MRU-B1.1 MRU-B2 MRU-E MRU-P Output Signals Heave, Surge and Sway Heave, Surge, Sway, Pitch and Roll Heave, Surge, Sway, Heading, Pitch and Roll Heave, Surge, Sway, Heading, Pitch, Roll, Position and Velocity Pitch & Roll Accuracy (RMS) N/A MRU-PD WS-E WS-PD Heave, Surge, Sway, Dual Antenna Heading, Pitch, Roll, Position and Velocity Dual Antenna GNSS, External Magnetic Compass (optional) Wave Energy, Spectral Data, Fourier Coefficients, Attitude Wave Energy, Spectral Data, Dual Antenna GNSS Survey Craft, Loading Dock, Platform Heave Compensation Crane Rotation Compensation, Nearshore Drilling...
Open the catalog to page 47
RAILWAY MOTION CONTROL UNIT 48
Open the catalog to page 48
Railway Motion Control
Open the catalog to page 49
REMOTE SENSING PAYLOAD INSTRUMENT 50
Open the catalog to page 50
TELEDYNE EchoONE System Accuracy (max. achievable)
Open the catalog to page 51
RESEPITM GEN-II
Open the catalog to page 52
Remote Sensing Payload Instrument Data Internal Precision (max. achievable)
Open the catalog to page 53
Data Internal Precision (max. achievable)
Open the catalog to page 54
(9) 20098 Ashbrook Place Ashburn, VA 20147, USA
Open the catalog to page 56All Inertial Labs, Inc. catalogs and technical brochures
 RESEPI Product Brochure 2025
RESEPI Product Brochure 202516 Pages
- Inertial system
- IMU inertial system
- Drone gyroscope system
- High-accuracy inertial system
- MEMS inertial system
- AHRS inertial system
- GNSS inertial system
- INS inertial system
- 3-axis inertial system
- Miniature inertial system
- Navigation inertial system
- ITAR-free inertial system
- Avionics instrument inertial system
- Inertial system with integrated GPS
- LIDAR laser
- Drone LIDAR laser
- Mapping LIDAR laser
- Surveying LIDAR laser
- Measurement LIDAR laser
- GNSS LIDAR laser